電子回路設計の基礎 > 3-5. 伝達関数ってなに?
伝達関数ってなに?
制御工学(制御理論)とは、入力と出力の関係を表す「伝達関数」と呼ばれる関数を用いて、その入出力システムの挙動や安定性を評価するものです。伝達関数は F(s) というように 複素数 s の関数で表されます。
私たちが「入出力の関係を表す関数」といって直感的に理解しやすいのは、y(t) = f(t) × x(t) というような時間 t の関数です。
しかし伝達関数が扱う”領域”は、”時間領域”ではなく”s領域”なのです。
それでは何故、”時間領域”ではなく分かりにくい”s領域”で計算しなければならないのでしょうか?
制御理論について書いてある本ならたいていその理由は説明されているはずなのですが、分かりやすく書かれている本があまり見当たらないように思います。
そこでこのページでは、あるシステムの入出力関係の式を求めるのに何故わざわざ”s領域”で計算を行う必要があるのかについて説明したいと思います。
1. 入力と出力の関係を表す関数について考える
入力と出力の関係を表す関数を求めるとき、その関数は任意の入力に対して出力が求められることが要求されます。
つまり「どのような入力に対しても、その関数を用いれば出力が求まる」というような一般式を求める必要があります。
なぜなら、入力の種類ごとに関数の求め方が異なるようでは非常に面倒です。
また、あらゆる分野において言えることですが、数式は一般化されることにより色々と有効な解析を行うことが可能になります。
下の図は、抵抗とコンデンサで構成された回路です。
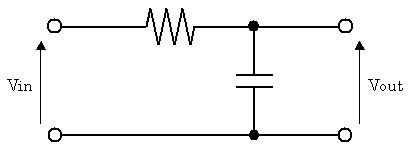
図1. 抵抗とコンデンサで構成された回路
この回路に 図2 (a) のようなsin波の電圧を入力したとき、出力の電圧は同図 (b) のように入力に対して「遅れ」を持ち、また同時に入力に比べて振幅が減衰して出力されます。
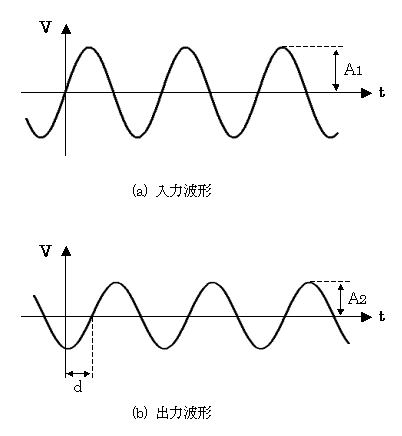
図2. 入出力特性 (sin波)
一方、図1の回路に図3 (a) のようなステップ状の波形を入力したときは、同図 (b) のようになまった波形が出力されます。
図3. 入出力特性 (ステップ状の入力波形)
図1はローパス回路と呼ばれるもので、上で述べたような特性を持ちます。
さて、問題です。
図1の回路の入出力の関係を表す一般式は、どのようにして求めることが出来るのでしょうか?
この二つの特性を同時に満たす関数 f(t) を求めてみることにしましょう。
図2の特性は入力を A1・sin(w・t) とすると出力は A2・sin{w・(t-d)} というようになります。
出力 y(t)、入力 x(t) としたとき、入出力の関係を y(t) = f(t) × x(t) と表したとしたら f(t) は以下のようになります。
f(t) = y(t) / x(t) = B・sin{w・(t-d)} / A・sin(w・t)
しかし、この関数を使って 図3 の特性は出てきません。
さて、それではどのような求め方をすれば任意の入力に対する一般式を導き出すことが出来るのでしょうか?
結論から言うと下の図4 (a) に示す入力に対する出力を求めることができればよいのです。
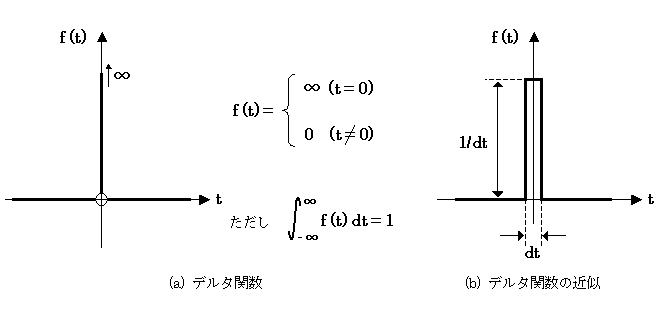
図4. デルタ関数
図4 (a) はデルタ関数と呼ばれ、t=0 で ∞ 、それ以外で 0 となる関数で、なおかつ積分値が 1 となります。
積分値が 1 となるということは、面積が 1 となるということです。
この関数は直感的には分かりづらいものですが、次のように考えると理解しやすいです。
図4 (b) のように、幅 dt と高さ 1/dt を持つ関数があるとします。この関数の積分値、つまり面積は dt×(1/dt) = 1 です。
デルタ関数は、この図(b)の dt を極限まで小さくした関数と考えてください。
たとえば、図5 (a) に示すように入出力システム G があり、この G に先ほどのデルタ関数の波形を入力したときの出力が同図(b)のような波形だったとします。(この応答をインパルス応答と言います。)
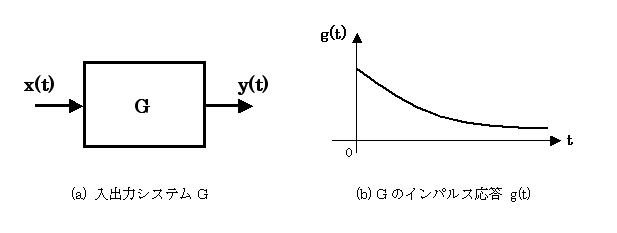
図5. 入出力システムとインパルス応答
このとき制御理論では、任意の入力に対して得られる出力を次のように考えます。
入力と出力を持つあるシステムに、下の図6 (a) のような入力波形が入るとします。
ここでこの入力波形を同図 (b) のように幅の狭いパルスの集まりだと考えます。(非常に幅の狭いパルスだと考えてください。)
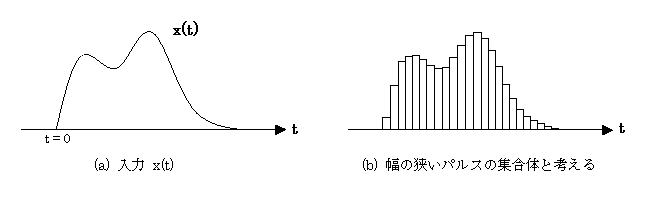
図6. ある入力波形 x(t)
そして、この幅の狭いそれぞれのパルスに対するインパルス応答の合計が出力波形となるのです。
図7 (a) は入力ですが、たとえば同図 (b) のように t = τ1 のときのパルスに対する応答について考えてみます。
(パルスの幅 ⊿τ は十分に小さいものとします。)
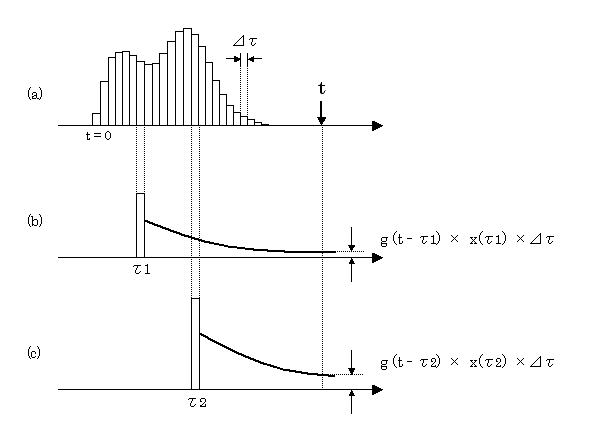
図7. 各τにおけるインパルス応答
図5 (b) はインパルス応答ですが、このときの入力はデルタ関数です。
デルタ関数は積分値(面積)が 1 ですが、図7 (b) の場合は x(τ1)×⊿τ の面積を持ちます。
そのため時間 t における応答は g(t - τ1) × x(τ1)×⊿τ と表されます。
また t = τ2 のときも同様に、応答は g(t - τ2) × x(τ2)×⊿τ と表されます。
このようにして、入力 x(t) に対する出力 y(t) はそれぞれの細いパルスに対する応答の合計となります。
このパルスを極限まで細くすると下式を得ます。
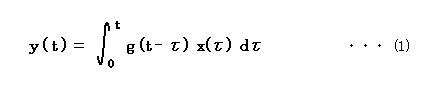
これが、任意の入力に対する一般式となります。
◆ おすすめの本 - 演習で学ぶ基礎制御工学
↓↓ 内容の一部を見ることができます ↓↓
- 演習を通して、制御工学の内容を理解できる。
- 多くの具体例(電気回路など)を挙げて、伝達関数を導出しているので実践で役に立つ。
- いろいろな伝達関数について周波数応答(周波数特性)と時間関数(過渡特性)を求めており、周波数特性を見て過渡特性の概要を思い浮かべることが出来るように工夫されている。
- ラプラス変換とラプラス逆変換の説明
- 伝達関数の説明と導出方法の説明
- 周波数特性と過渡特性の説明
- システムの安定判別法について
○ amazonでネット注文できます。
◆ その他の本 (検索もできます。)
2. 伝達関数
ようやく式(1) のような一般式を導き出すことができたのですが、やはり問題があります。
それは、インパルス応答 g(t -τ) と入力 x(τ) を掛け合わせて積分せねばならず、計算が面倒だということです。
実はこの面倒な式を、簡単な式に変換する方法があります。
それがラプラス変換なのです。
ここでは詳細な式の導出は省略しますが、式(1) のラプラス変換は以下のようになります。

この式(2) を見ると分かるとおり、y(t) 、g(t) 、x(t) のラプラス変換式で構成されています。
それぞれのラプラス変換を Y(s)、 G(s)、 X(s) とすると式(2) は以下のようになります。

この式の G(s) が伝達関数と呼ばれるものです。
式(3) は出力 Y(s) を得るためには 入力 X(s) と伝達関数 G(s) を掛けて求めるだけでよく、式(1) のような面倒さがありません。
これがラプラス変換を行い、わざわざ”s領域”で計算を行う理由なのです。